OpenCV를 이용한 도로표지 영상에서의 방향정보 자동인식
1) 도로 영상에서 도로표지에 해당하는 부분만 추출하는 방법
도로표지의 색상정보를 이용
지상 LiDAT로부터 도로진행방향에 수직인 면만 추출
2) 컬러영상->흑백영상->이진영상으로 변환하여 추출
흑백영상으로 변환된 도로표지 영상
-> 선형 스트레칭 방법으로 영상 개선 수행
-> 중간 밝기값은 128을 임계값으로 적용하여 이진영상 변환
이진화 방법: 단순임계값, 조정임계값, 영상기반임계값(원본 컬러영상의 rgb 특징값을 분석)
3) 방향정보 영역 검출
도로표지 내 방향정보는 종방향, 횡방향으로 연속된 밝기값이 나온다는 특징이 있음
->line scan을 통한 연속셀 검출 방법을 적용해 방향정보 영역을 검출
->종방향, 횡방향으로 각각 255의 밝기값이 나타나는 연속된 셀 개수를 탐색, 연속된 셀이 존재하는 셀을 대상으로 연속된 셀 개수의 최대값으로 변경, 변경된 셀을 대상으로 임계값 이하의 셀은 0의 밝기값으로 변경
->도로표지 내 방향정보 영역의 연속된 셀 크기는 다른 정보 영역(문자,기호)에 비하여 크게 표현되므로 구분이 가능함
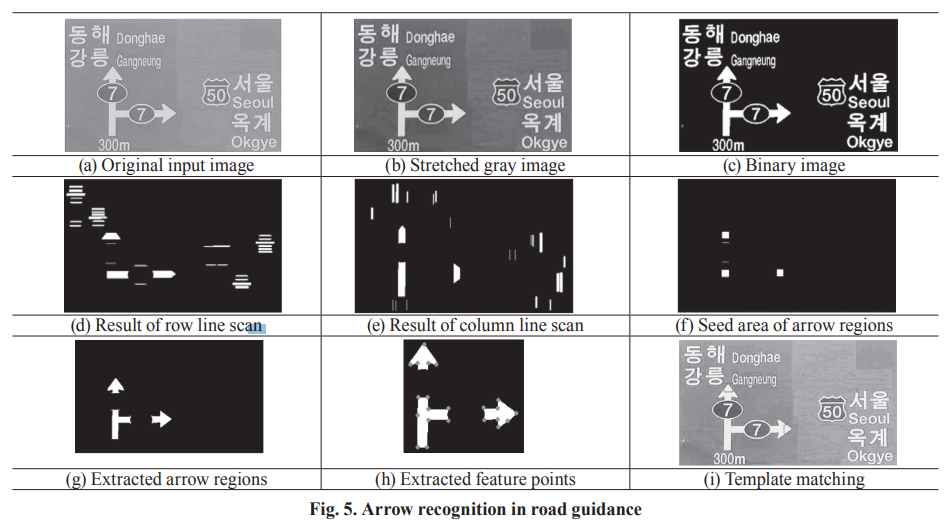
영상개선, 영상이진화, 횡방향/종방향 연속셀 검출, 특징점 추출, 템플릿 영상정합, 정합결과 출력
good features to track 알고리즘: newton-rhapson 방법을 확장한 객체 추적 알고리즘으로, 가장 확률 높은 특징점(corner point)을 추출하는 데 적용->영상정합 효율성을 높임
template matching 기법: 영역기반 영상정합 방법의 일종으로, 검출된 방향정보 영역으로부터 방향정보를 인식
(d),(e) 횡방향, 종방향 line scan 결과에 방향정보 외 영역(문자,일부기호)가 검출되었으나
두 방향 scan 결과를 합성한 결과 (f)처럼 방향정보 영역의 seed만이 검출됨
-> seed를 기반으로 region growing 알고리즘을 적용한 결과 (g)처럼 방향정보 영역이 검출됨
-> 특징점 추출 알고리즘을 적용한 결과 (h)처럼 22개의 특징점이 추출됨
-> 22개의 특징점을 탐색 설정에 이용해 영상정합한 결과 (i)처럼 정합됨 (북쪽 0.937, 동쪽 0.930의 상관계수)
'복수전공(소프트웨어공학) > AI 및 졸업논문' 카테고리의 다른 글
| 2,3,4,5강 요약 (0) | 2022.07.27 |
|---|---|
| 1강 요약 (0) | 2022.07.19 |
| 객체탐지 (0) | 2021.11.06 |
| 직선 검출 (실용 엣지검출) (0) | 2021.10.30 |
| AI 이미지 인식 (제스처 위주로) (0) | 2021.09.22 |

